

用于激光稳定的快速压电偏转系统
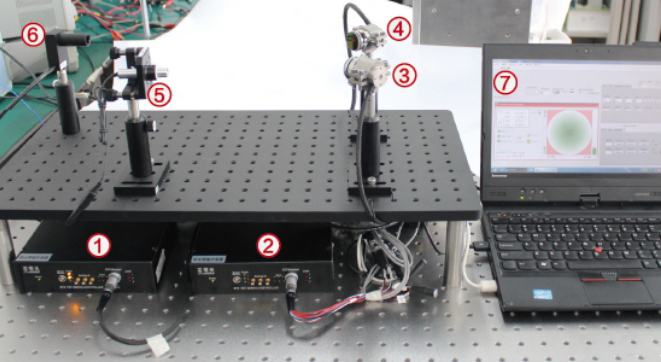
系统中部件分别为:
① E70.D3S压电控制器,用于控制干扰用压电偏转镜;
② E70.D3S压电控制器,用于控制补偿用压电偏转镜;
③ P33.T2K压电偏转镜,产生干扰信号,使激光产生抖动;
④ P33.T2K压电偏转镜,产生补偿信号,使激光稳定;
⑤ 激光器,光源;
⑥ 激光位置探测器,实时探测激光的位置;
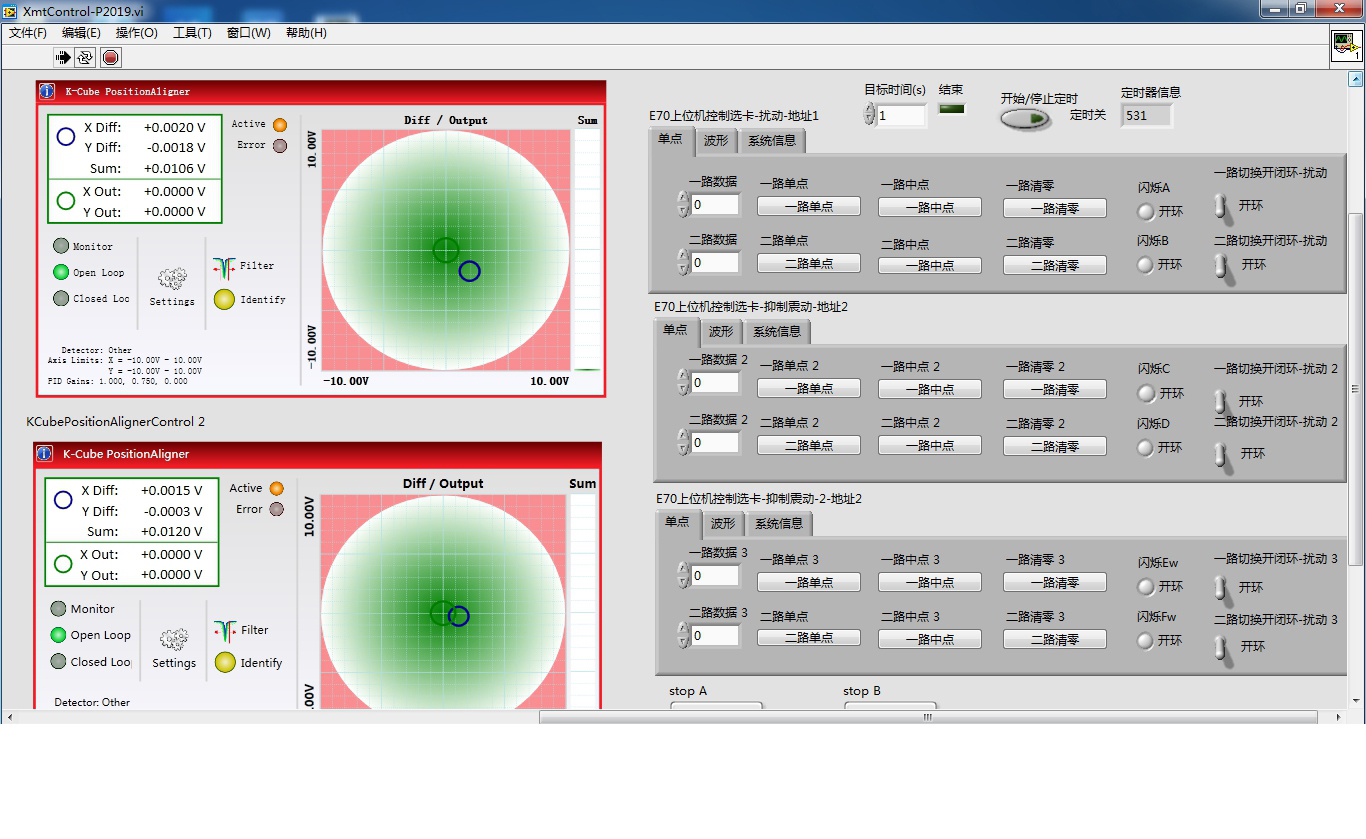
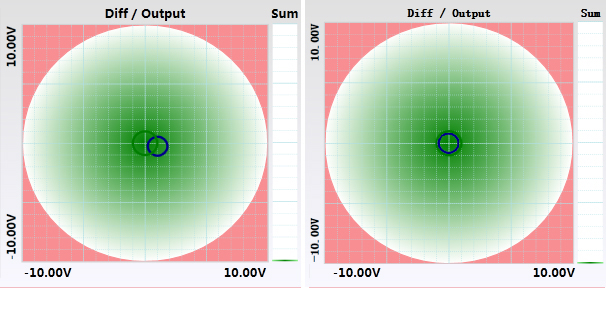
⑦ 电脑,闭环补偿控制与补偿效果显示。
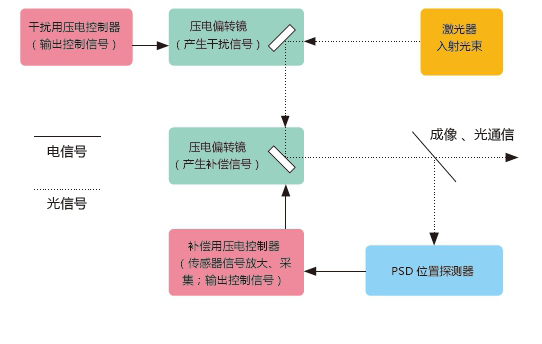
一阶激光稳定系统结构原理
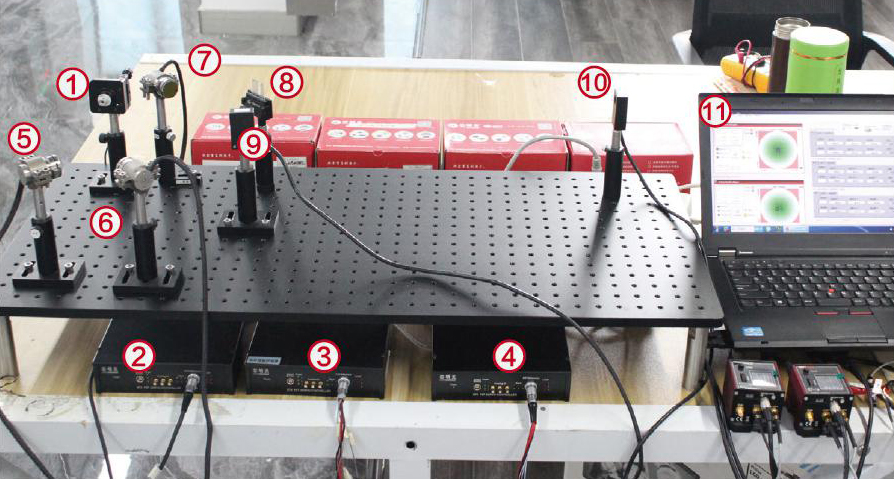
系统中部件分别为:
① 激光器,光源;
② E70.D3S压电控制器,控制干扰用压电偏转镜;
③ E70.D3S压电控制器,控制补偿用压电偏转镜1;
④ E70.D3S压电控制器,控制补偿用压电偏转镜2;
⑤ P33.T2K 压电偏转镜,产生干扰信号,使激光传输不稳;
⑥ P33.T2K 压电偏转镜,产生补偿信号1,使激光传输保持稳定;
⑦ P33.T2K 压电偏转镜,产生补偿信号2,使激光传输保持稳定;
⑧ 45°分光镜;
⑨ PSD激光位置探测器1,实时探测并反馈激光的位置;
⑩ PSD激光位置探测器2,实时探测并反馈激光的位置;
⑪ 电脑,闭环补偿控制与补偿效果显示。
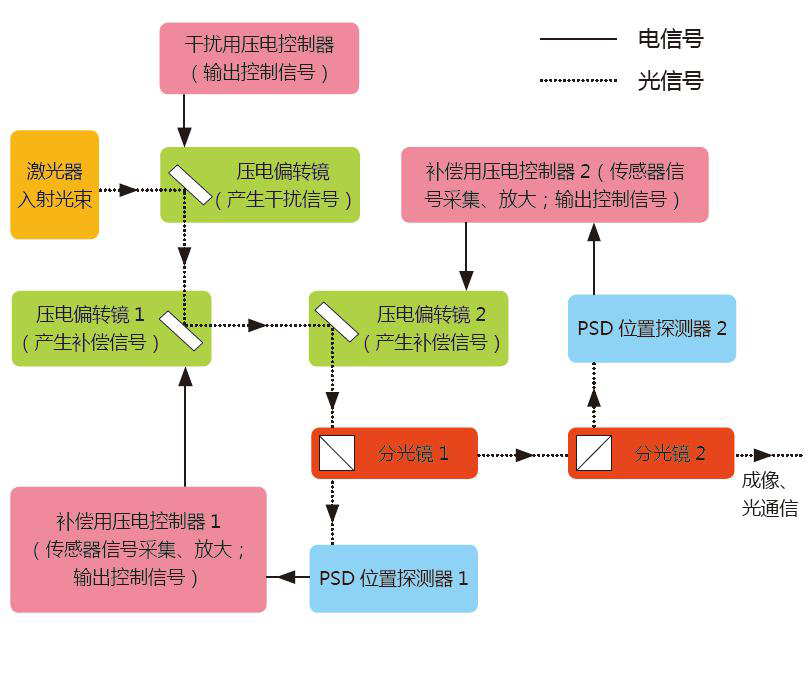
二阶激光稳定系统结构原理
1、压电偏转镜与压电控制器

通常情况下,E70.D3S压电伺服控制器与压电偏转镜内置的应变传感器反馈的信号形成闭环控制。而在该激光稳定系统中,采用的是PSD位置探测器反馈的控制信号,与E70.D3S形成闭环伺服控制。
P33.T2K压电偏转镜参数如下:
|
型号 |
P33.T2K |
P33.T2S |
单位 |
|
|
运动自由度 |
θx、θy |
θx、θy |
|
|
|
标称行程范围(0~120V) |
±1.25 (≈±260秒) |
±1.25 (≈±260秒) |
mrad |
|
|
行程范围(0~150V) |
±1.5(≈±300秒) |
±1.5 (≈±300秒) |
mrad |
|
|
传感器类型 |
- |
SGS |
- |
|
|
闭/开环分辨率 |
0.02(<0.01秒) |
0.05(≈0.01秒) |
μrad |
|
|
闭环线性度 |
- |
0.1 |
%F.S. |
|
|
闭环重复 定位精度 |
- |
0.02 |
%F.S. |
|
|
空载谐振频率 |
3.7 |
3.7 |
kHz |
|
|
闭/开环空载阶跃时间 |
1 |
1.5 |
ms |
|
|
闭环空载工作频率 |
10%行程 |
1000 |
1000 |
Hz |
|
100%行程 |
80 |
80 |
||
E70.D3S压电控制器技术参数如下:
|
型号 |
E70.D3S |
|
功能 |
数字与模拟集成式控制器 |
|
通道数 |
3 |
|
标称模拟输入范围(V) |
0~10 |
|
峰值电流(A) |
1.1/通道 |
|
平均电流(mA) |
70/通道 |
|
放大器带宽(Hz) |
10k/通道 |
|
伺服特性 |
P.I+低通+陷波 |
|
通信接口 |
RS-232/422、USB |
|
过流保护 |
有 |
|
供电电压 |
24V DC1.5A(36W) |
2、PSD位置探测器

技术参数:
|
传感尺寸 |
φ7.8mm |
|
波长范围 |
400~1050nm |
|
峰值响应度 |
0.4 A/W(633nm)、0.64A/W(900nm) |
|
跨阻增益 |
10kV/A |
|
最大光电流 |
200μA |
|
输出电压范围 |
±2Vmin |
|
信号输出偏置 |
100mV,max |
|
带宽 |
150kHz |
|
推荐光点尺寸 |
φ1~3.9mm |
|
供电电压 |
±5VDC±5%,35mA |
3、激光光源

技术参数:
|
激光安全等级 |
3R |
|
工作电压 |
4.9V至5.2V |
|
波长 |
635nm, max640nm |
|
椭圆光束尺寸 |
4.5mmx1mm |
|
工作电流 |
Typ48mA, max 70mA |
|
轴偏差 |
5mrad |
|
光束发散 |
1.5mrad |
|
光输出功率 (CW) |
4~5.0mW |
