

利用压电偏转镜进行超精密激光加工
一、芯明天压电偏转镜-压电偏转镜/快反镜/倾斜镜

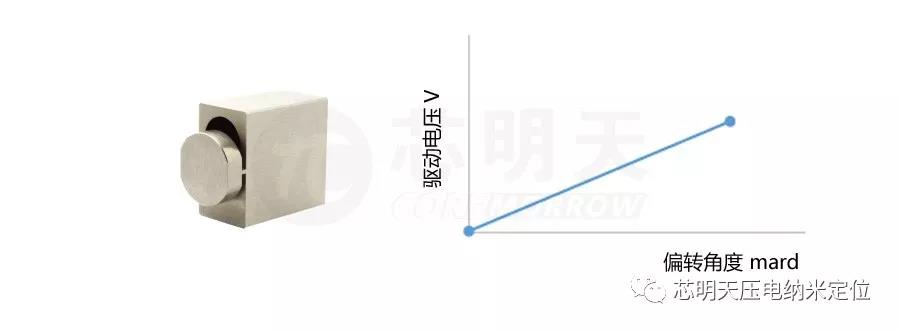
芯明天压电偏转镜是基于压电陶瓷促动器驱动的快速偏转镜,通过直驱或放大柔性铰链结构,使转动平台做一维或多维的偏转运动。且它具有达几千赫兹的谐振频率,阶跃时间可达亚毫秒;扫描角度可达几度,分辨率可小于0.01角秒;零摩擦和零粘力的铰链导向,使得导向精确性优良,采用传感器的闭环系统,具有很高的精确度及线性度。
二、芯明天压电偏转镜基本参数举例
|
运动轴 |
型号 |
偏转角度[mrad] |
分辨率[μrad] |
|
θx |
P22 |
4 (≈800秒) |
0.1 (≈0.02秒) |
|
θx, θy |
P33.T2 |
3.5 (≈700秒)/轴 |
0.02 (<0.01秒) |
|
P33.T4 |
6.8 (≈1400秒)/轴 |
0.1 (≈0.02秒) |
|
|
P33.T8 |
13.5 (≈2700秒)/轴 |
0.2 (≈0.04秒) |
|
|
P34.T1 |
1.5 (≈300秒)/轴 |
0.02 (<0.01秒) |
|
|
P34.T2 |
3 (≈600秒)/轴 |
0.1 (≈0.02秒) |
|
|
P34.T4 |
6 (≈1200秒)/轴 |
0.2 (≈0.04秒) |
|
|
P31 |
25 (≈5100秒)/轴 |
1 (≈0.2秒) |
|
|
θx, θy, Z |
P32 |
θx, θy, 6 (≈700秒) Z 40μm |
0.05 (≈0.01秒)
0.5nm
|
|
P36 |
θx, θy, 0.55 (≈115秒) Z 12μm |
0.02 (<0.01秒)
0.1nm
|
三、芯明天压电偏转镜原理
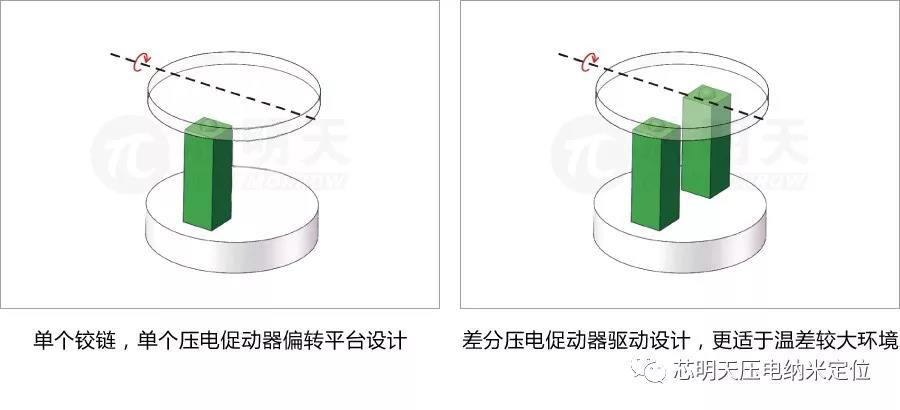
3.1一维压电偏转镜原理
一维压电偏转镜分为两种结构,一种为平台由一个铰链支撑,并且由一个线性压电促动器推动。铰链确定了轴心点,并加倍了作用于压电促动器的预紧力。单个铰链单个促动器设计的优点是结构简单、体积小巧、性价比高等。
另一种为双压电促动器驱动型,即由两支陶瓷促动器共同的运动来驱动平台台面偏转,这种结构的优点是可承载大,适用于工作环境温度变化范围较大的应用。
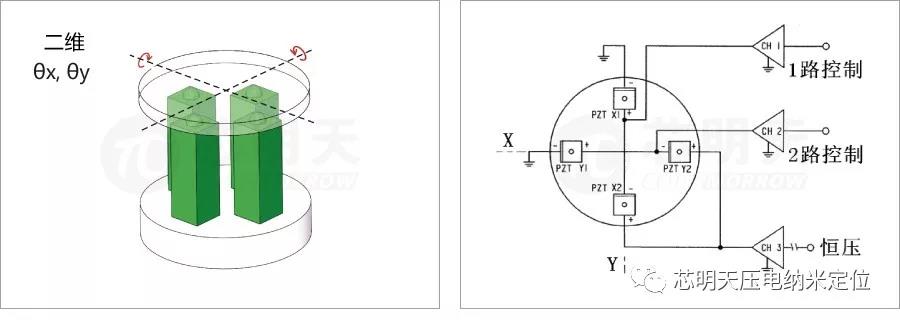
3.2二维压电偏转镜原理
二维压电偏转镜是基于平行运动学设计,具有共面轴及移动面。四个执行机构为四支压电促动器,以90°角平分放置,成对的差分控制分布。两对差分驱动压电促动器在较大温度范围内提供可实现的角度稳定性。它的偏摆运动是由两对压电促动器以推拉模式来实现,采用桥式连接电路控制。
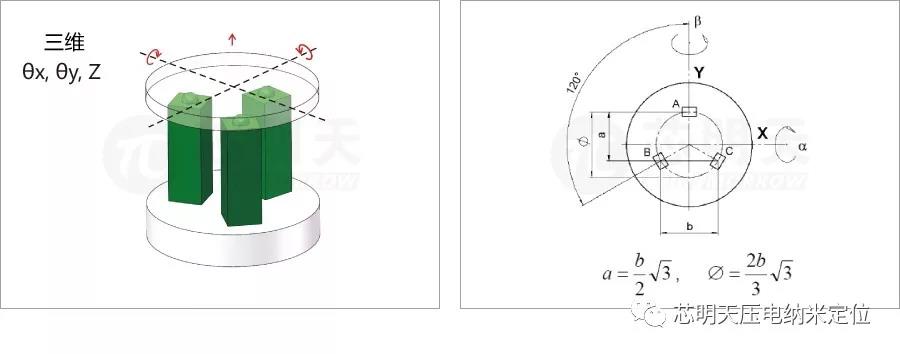
3.3三维压电偏转镜原理
三维压电偏转镜是三脚驱动方式,在较大的温度范围内提供了优化的角度稳定性。这种平台的设计具有几个优势:体积更小巧;两轴具有相同的大小及相同的动态性能;快的响应及好的线性度。它也防止了偏振旋转。
内部三支压电陶瓷促动器是由三通道控制器来分别单独驱动以产生俯仰/偏转运动或同时并联驱动以产生直线升降运动。
四、激光加工光束的调节范围-压电偏转镜在超快激光加工应用中可调节的光路范围
4.1一维θx压电偏转镜对光路可调节的范围
一维θx压电偏转镜对光路调整范围为一定范围的线段,线段长度取决于压电偏转镜的偏转角度及压电偏转镜与待加工件(或宏动结构)间的距离。
4.2二维θx θy压电偏转镜对光路可调节的范围
二维θx θy压电偏转镜对光路调整范围为一个圆面,圆面的面积大小取决于压电偏转镜的偏转角度及压电偏转镜与待加工件(或宏动结构)间距离。

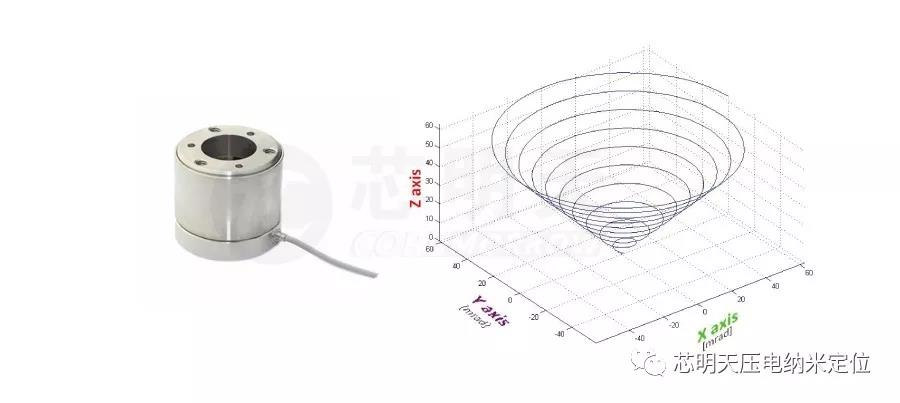
4.3三维θx θy Z压电偏转镜对光路可调节的范围
三维θx θy及Z向压电偏转镜对光路调整范围可形成一个锥形体,锥形体截面圆的面积大小及锥体高度取决于压电偏转镜的偏转角度、直线运动范围及压电偏转镜与待加工件(或宏动结构)间距离。
五、应用举例-超精密激光加工产品举例
以下为几个简单的加工样例。
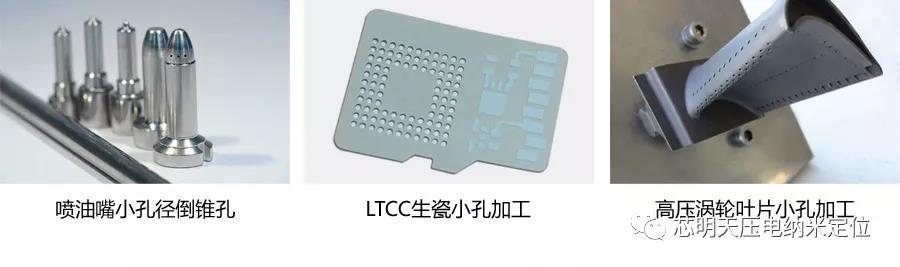
哈尔滨芯明天科技有限公司提供的压电陶瓷偏转镜具有体积小、位移分辨率高、频响高、无噪声、不发热等特点。且已经过多家科研院所测试,验证了压电偏转镜分辩率及重复定位精度,在要求偏转角度为mrad量级、分辨率要求μrad量级的激光扫描系统中表现出很好的特性,且已在半导体加工、军事探测、航空航天、生物医学、纳米科学研究等领域得到了越来越多的应用。
咨询热线:0451-86268790。 扫描下方二维码,关注芯明天微信公众号及芯明天技术总监微信可获取更多信息。


