P32压电偏摆镜的原理及动态特性
P32系列偏摆镜使用高可靠性陶瓷驱动器驱动,驱动器采用全绝缘结构,因此其性能和使用寿命远远优于传统驱动器,绝缘层可以有效防止压电陶瓷受潮而失效。因此在极端的环境下也能保证压电陶瓷的稳定性,与传统驱动机构相比,没有转动部件和摩擦,因此陶瓷驱动器具有无反弹、免维护、无磨损等特点。

P32系列偏摆镜采用柔性铰链机构,具有无摩擦、定位精度高等优点,柔性铰链是一种不受静态和动态摩擦影响的元件,基于固体(例如钢)的弹性变形并且没有滚动和滑动部分,柔性单元具有很高的刚度和承载能力,铰链导向无需维护并且无磨损,不需要润滑油。
应变式传感器通过本身膨胀来检测位置信息,它们被固定在传动部分的适当位置,测量出移动部分的位移,这种类型的位置测量是通过接触和间接测量出来的。因此移动平台位移是通过测量杠杆、导向铰链或者压电陶瓷堆测量出来的。
P32压电偏摆镜θX/θY行程可达6mrad,整体采用柔性铰链结构、具有无机械摩擦、响应速度快、重复定位精度高等优点。本产品还可以根据需求来进行定制,具有极高的灵活性,操作简便,满足不同应用场合。
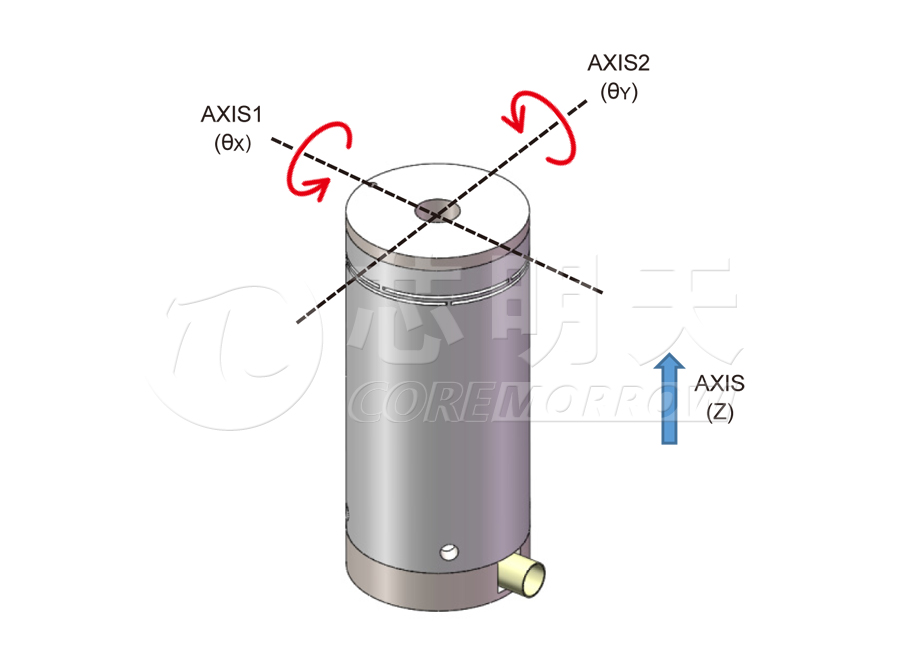
运动方向
工作原理
压电控制原理框图如下所示:
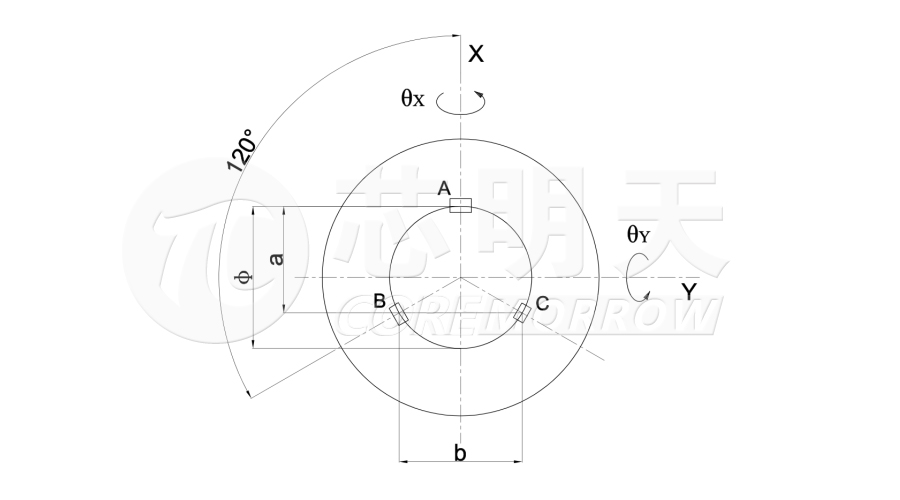
偏摆镜(两轴)是基于三个压电陶瓷结构设计而成,每轴陶瓷单独控制,以推拉模式行程偏转运动,采用桥式连接电路控制,三个机构以120度平分放置,可以消除温度对压电陶瓷的影响,在大范围温度变化下保持良好的角度稳定性。
偏摆镜偏转角度以及Z向位移公式如下:
绕X轴偏转角度为:

绕Y轴偏转角度为:
Z向位移为
其中:
A -压电陶瓷A的位移;
B -压电陶瓷B的位移;
C -压电陶瓷C的位移;
偏摆镜动态特性
P32的使用频率大小取决于产品的共振频率,为了估算加载镜片以后的共振频率(运动面和镜片),镜片的转动惯量必须考虑在内,镜片的转动惯量计算如下:
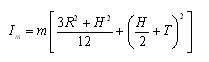
圆柱形截面镜片的转动惯量
矩形截面镜片的转动惯量
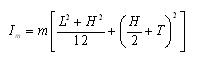
其中:
M - 镜片质量
Im - 镜片的转动惯量
L - 垂直于旋转轴的镜片长度
H - 镜片厚度
T - 旋转轴到平台表面的距离
R - 镜片半径
利用空载共振频率和镜片的转动惯量可以计算整体的共振频率,计算公式如下所示:
其中:
f’-整体的共振频率
I0-空载运动面转动惯量
f0-空载共振频率
Im-镜片转动惯量
控制方式
假设控制电压上限为A,控制方式如下:
AXIS1(θX)控制方式:
CH2=A/2
CH1+CH3=A
AXIS2(θY)控制方式:
CH1=CH3
CH2+CH1/CH3=A
Z轴控制方式:
CH1=CH2=CH3
压电偏转镜的应用
压电偏转镜的偏转精度极高、响应速度毫秒甚至亚毫秒级且动态性能高,因此被广泛应用于图像稳定、光通信、自适应光学、激光跟踪、光路调整、激光加工等。
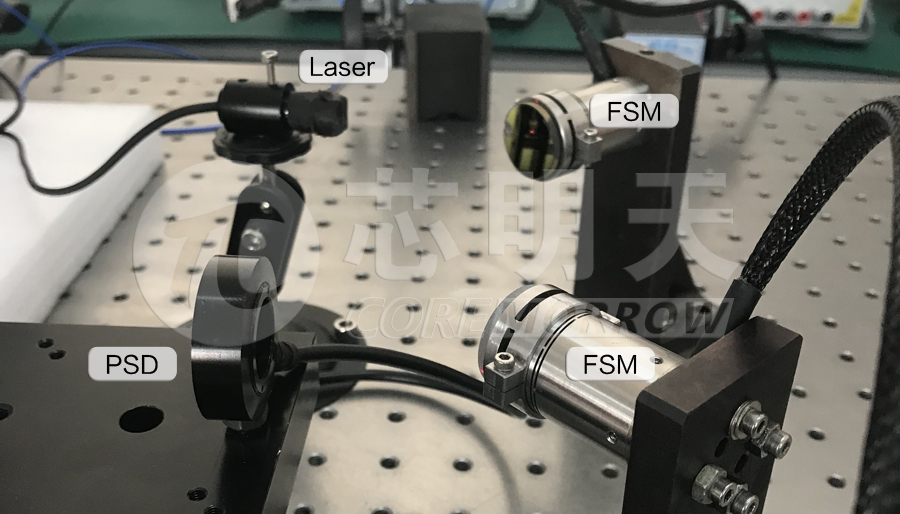
应用举例:光路调节
压电偏转镜可用于任何需要高精度光路调节的应用。例如,可作为光路的扰动补偿。同时,压电偏转镜也可用于产生扰动,如下图所示,一个压电偏转镜用于扰动,另一个压电偏转镜用于扰动的补偿。